(alle Bilder kann man anklicken, und sie öffnen dann in einem neuen Fenster)
Also das sind jetzt mal grob nur paar Dinge,
die ich mal gmacht hab. Etwas komprimiert und gekürzt.
Kleinprojekt, Nebenprojekt,
Schrittmotor ansteuern mit PC !
Eine der vielen Lochraster-Aufbauten,
diese hier ging an den Jodlbauer Elektronik,
hab ich ca. Jahr 2005 gemacht.
Es ist eine Ansteuerung und Endstufe für einen Schrittmotor
den man schiesslich über den PC steuern konnte.
Voll simple.
Dazu geliefert hab ich natürlich ein kleines Programm,
dort musste man nur irgendwelche Kurzzeichen in eine
stinknormale Textdatei schreiben, und dann drehte
sich der Motor exakt so, wie man wollte.
Beispiel der Textdatei:
L2520 S30 (dreht links herum um exakt 2520 Schritte, mit
der Geschwindigkeit 30)
R240 S55 (dreht rechts herum um exakt 240 Schritte, mit
der Geschwindigkeit 55)
P20 (macht einfach eine Pause)
 Frage stellen !
Frage stellen !
Bild von der aufgebauten Schaltung :

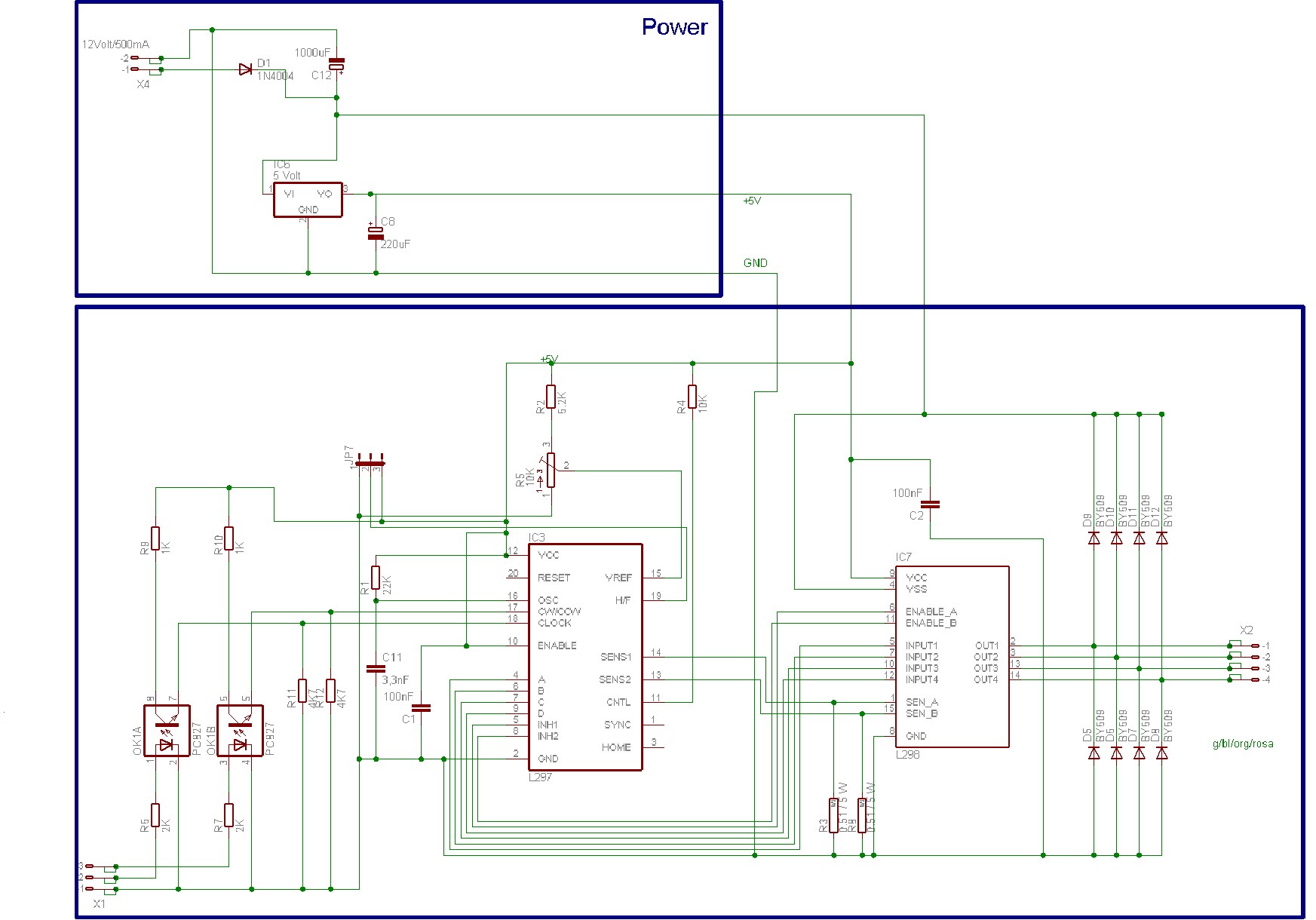
Bild vom Schaltplan :
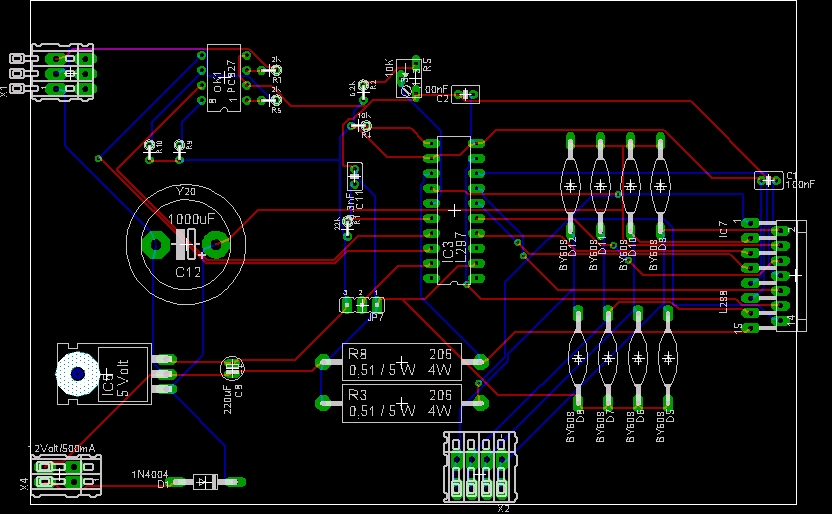
Bild vom Board (hab ich aber mechanisch nicht so aufgebaut,
sondern wie oben gezeigt, auf Lochraster) :

Frage stellen !
Nächstes Thema ....
Ein sehr grosses Projekt war eine Art speicherprogrammierbare
Steuerung (SPS). Diese wurde nach meiner Fertigstellung in eine echte
Produktionsanlage eingebaut.
Das Ganze entstand durch einen Zufall, ich kannte jemanden,
der wusste, dass ich eine Lösung haben würde für günstiges Geld.
Eigentlich entstand das in der Banane, des is ne Kneipe, kennst evtl. .
Ich bin schliesslich nach Köln gefahren, hab mein Entwicklungs-Teil
in die mechanisch bereits fast fertiggestellte Anlage einmontiert.
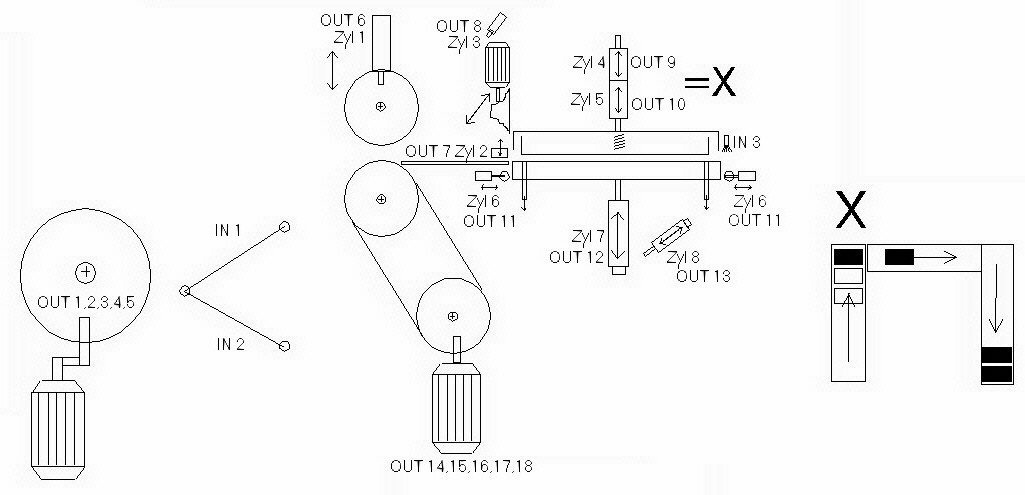
Hier meine einst gezeichnete Skizze der Anlage, damit ich mir vorstellen
konnte, um was es eigentlich ging :

Frage stellen !
Dann kam das Programmieren dran. Ich sass geschlagene 63 Stunden,
ohne zu Schlafen, an meinem Rechner mitten in dieser Werkstatt,
und hatte die verschiedenen
Funktionen einprogrammiert.
Wieso ich so lange dafür gebraucht hab,
das lag daran, dass es ein Prototyp war,
und die gesamte Aktion innerhalb kürzester Zeit
stehen sollte.
So hatte ich nur schnell ein kleines Programm in Excel geschrieben,
womit ich das Teil wenigstens überhaupt mal programmieren konnte.
Demnach war es ziemlich umständlich.
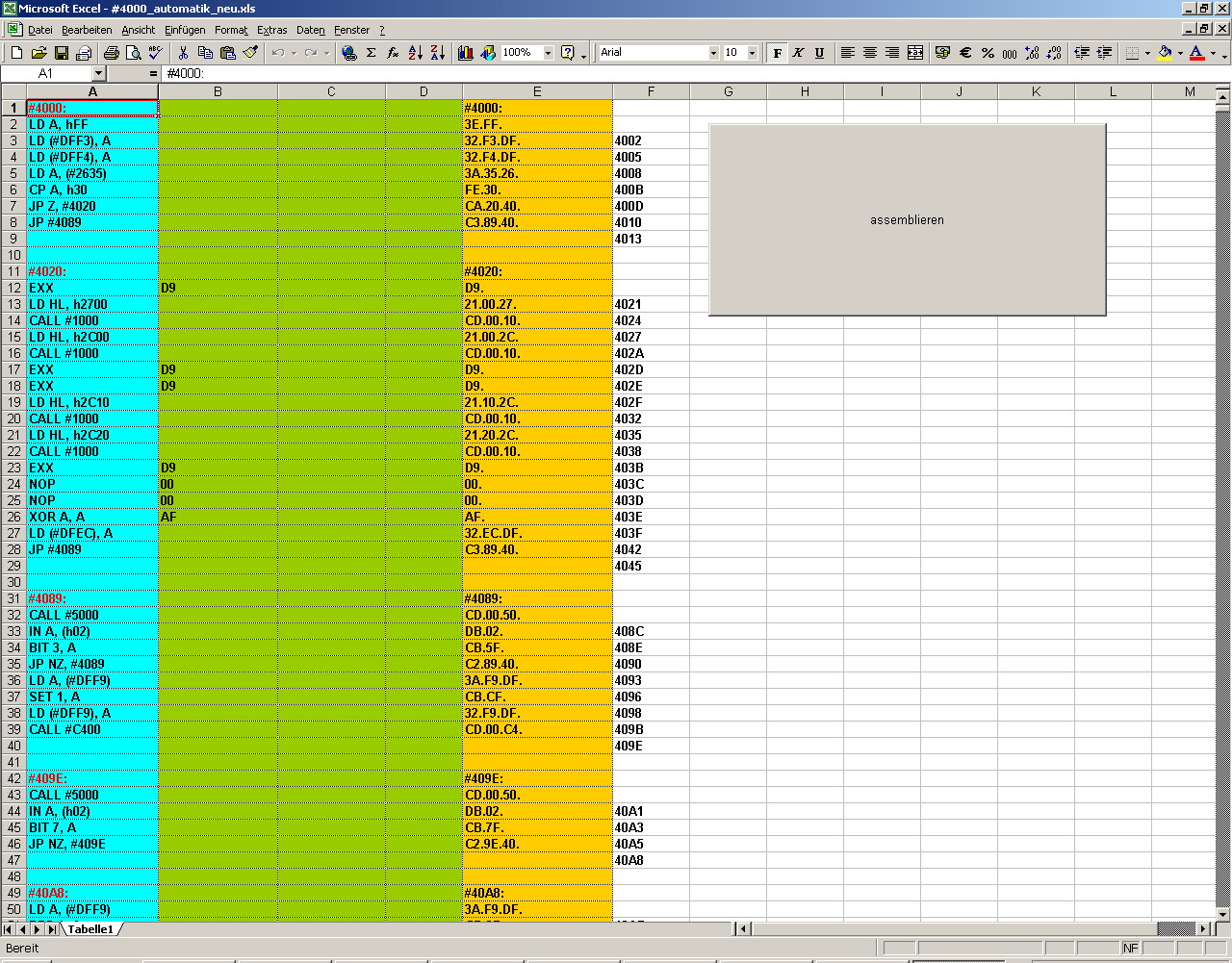
Ich hatte also meine Steuerung mittels einer Excel-Tabelle programmiert.
Hier mal ein einziges Bild einer solchen Excel Tabelle von seeehr vielen,
ich hatte ziemlich genau 49 solcher Tabellen, für jedes Unterprogramm eine.

Frage stellen !
Hier kann man direkt mal so eine Excel Tabelle ansehen : Klick !
Das ist sogar der Hauptteil des gesamten Ablaufes.
Hier hab ich zu meinem eigenen besseren Verständniss
immer wieder Bemerkungen dazu geschrieben, damit ich weiss, welcher Programmteil
was macht. Hat aber gefunzt.
Details erspar ich mir hier,
des is mir zuviel zum Schreiben grad .
Wäre Gesprächsstoff zum nächsten Grillen *fg*
Am Ende hab ichs aber geschafft. Und ich hab dann echt nur noch Zahlen
und Buchstaben (hexadezimal) gesehen.
Auch haben meine Gedanken nur noch in logischen Programmabläufen
bestanden. Irgendwo logisch, wenn man den Druck hat, es schnellstmöglichst
fertig zu bringen, und man deshalb so lange am Stück dransitzt.
Ich bin also dort in Köln in einer Werkstatt gesessen, Tag und Nacht,
die Senior-Inhaber (65 Jahre alt) haben mir immer was zu Essen gebracht,
weil sie das irgendwie wohl nicht sehen konnten. War aber voll nett
Dooferweise haben die am Montag natürlich wieder angefangen, zu arbeiten,
so hab ich dann auch noch in einem Höllenlärm nach bereits 40 Stunden
weiter machen müssen.
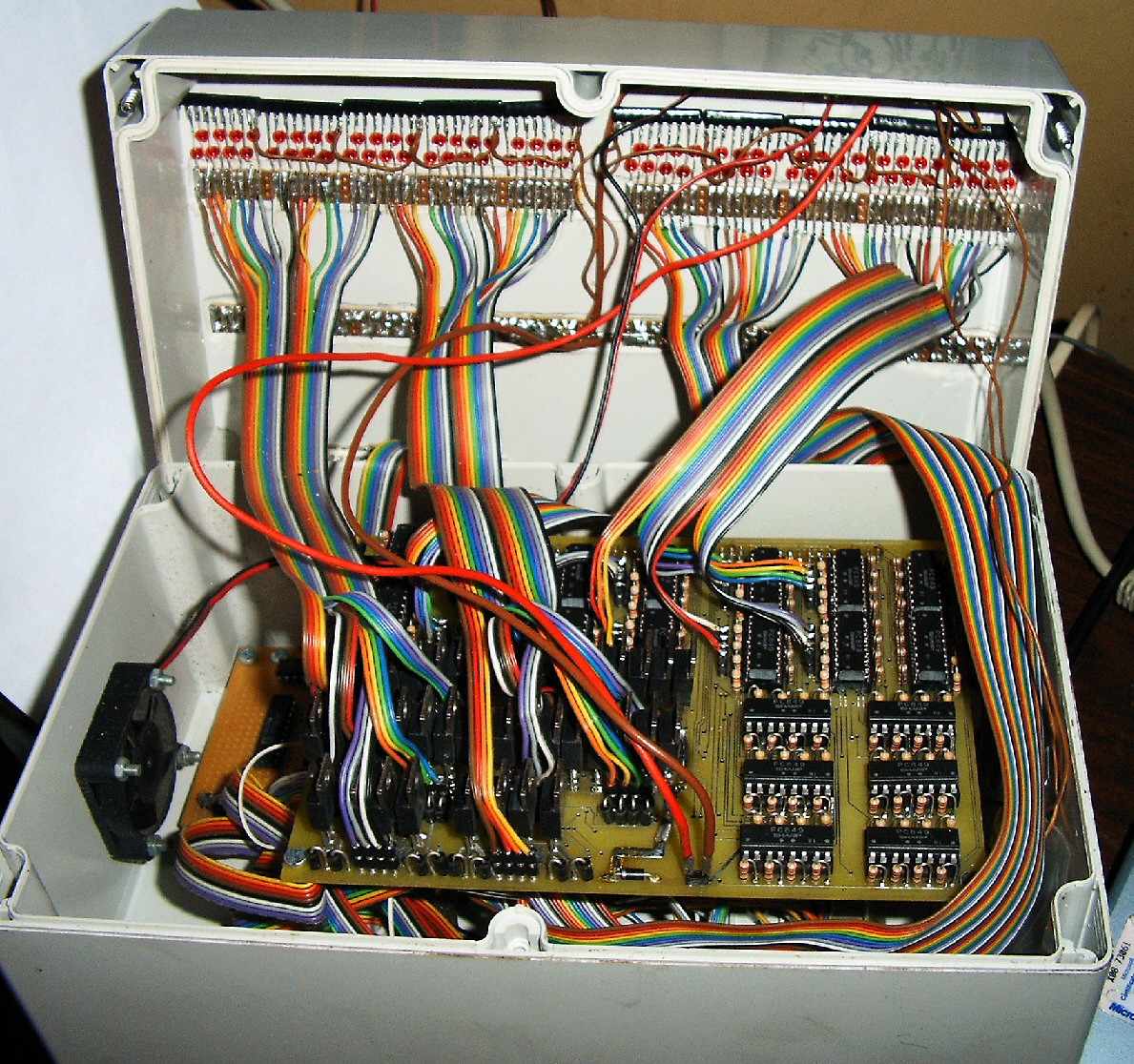
Hier mal drei Bilder meiner Steuerung :
Von aussen :

Von innen :

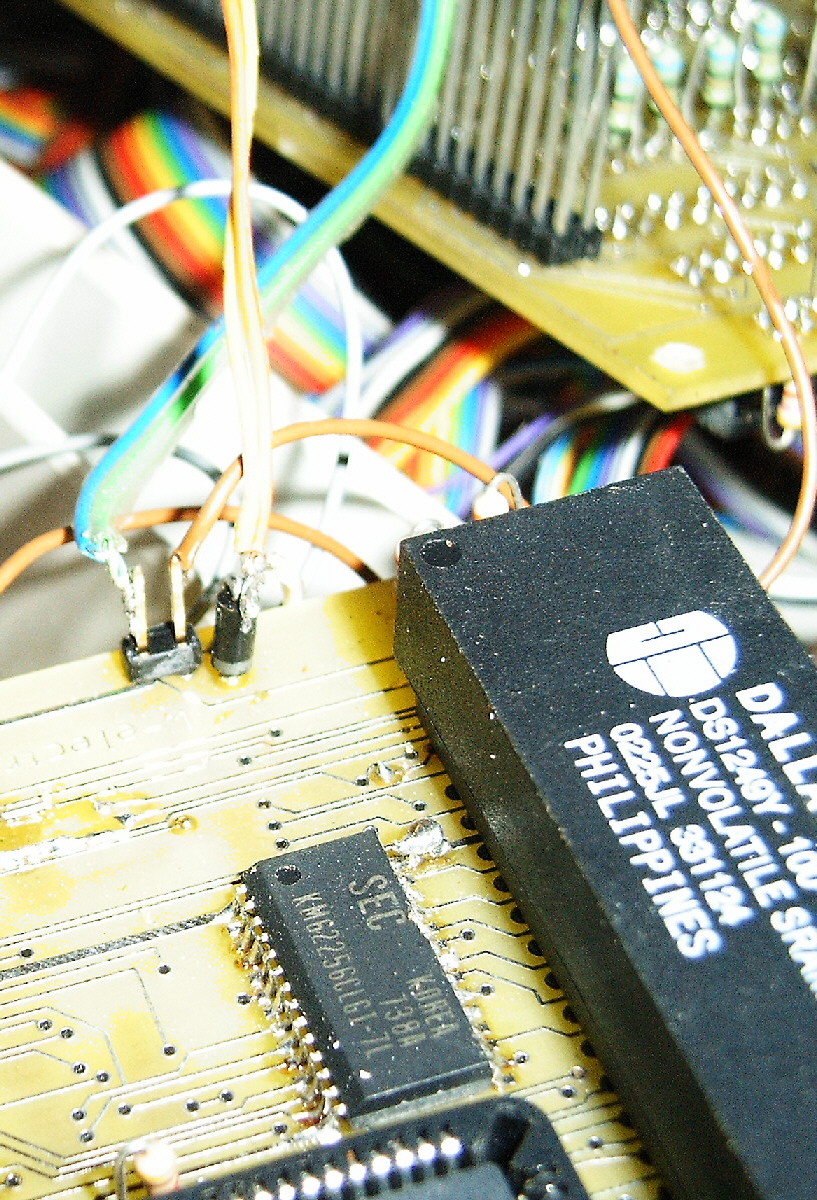
Von innen, zerlegt, Nahaufnahme von dem Bauteil (SRAM),
das mir immer wieder dazwischen gefunkt hat.
Es war ein Prototyp, also kommt so etwas erst im echten Betrieb raus.
Also hatte ich es schliesslich ausgelötet.
(Korea steht drauf) :

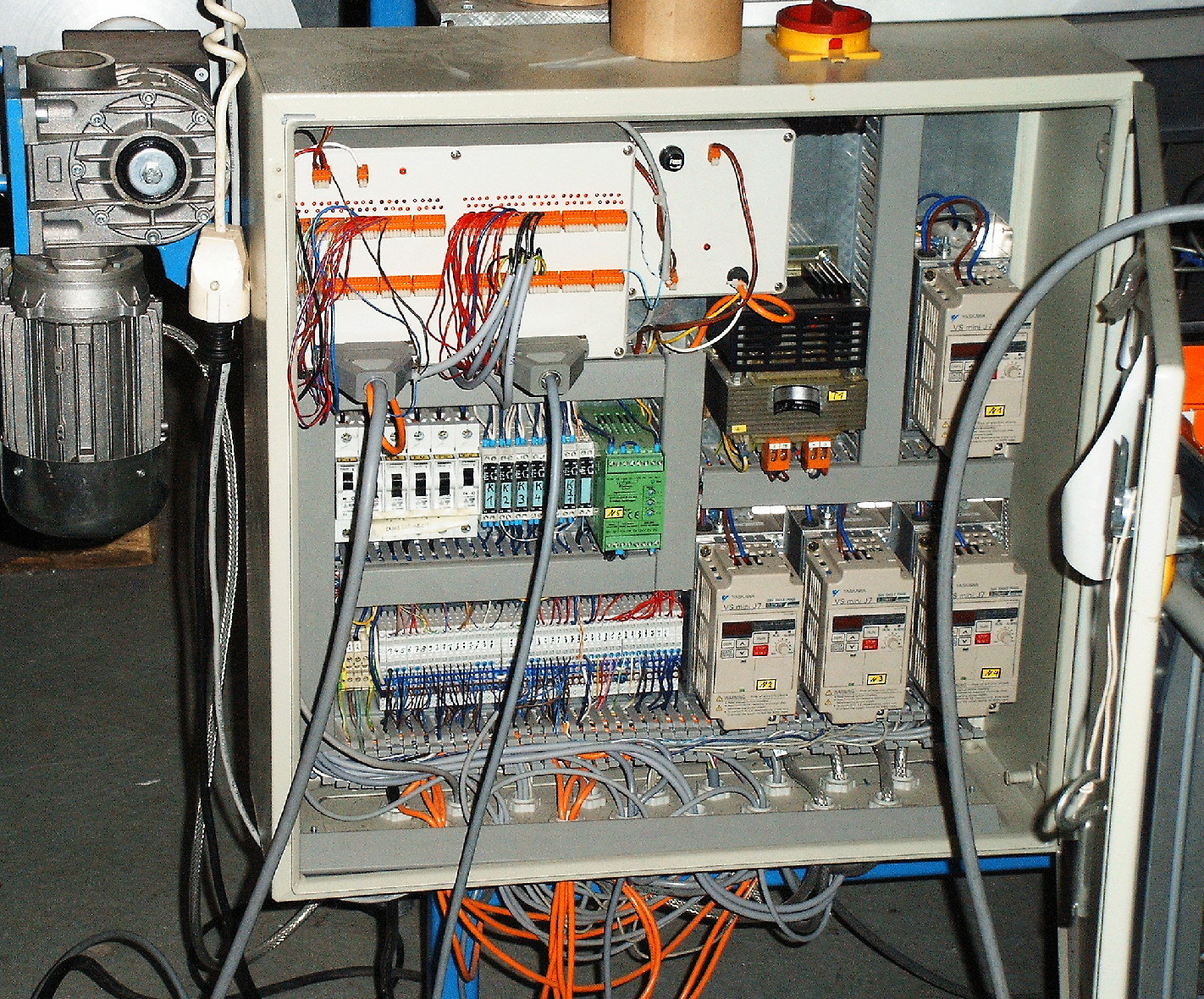
und schliesslich im Schaltschrank einmontiert :

Frage stellen !
Die Steuerung besteht aus zwei Leiterplatten.
Einmal die für die Logik und die elektrischen Vorstufen
und dann eine Leiterplatte für die Endstufen und die Umwandlung
von 5 Volt in 24 Volt und aben anders herum (genaueres später )
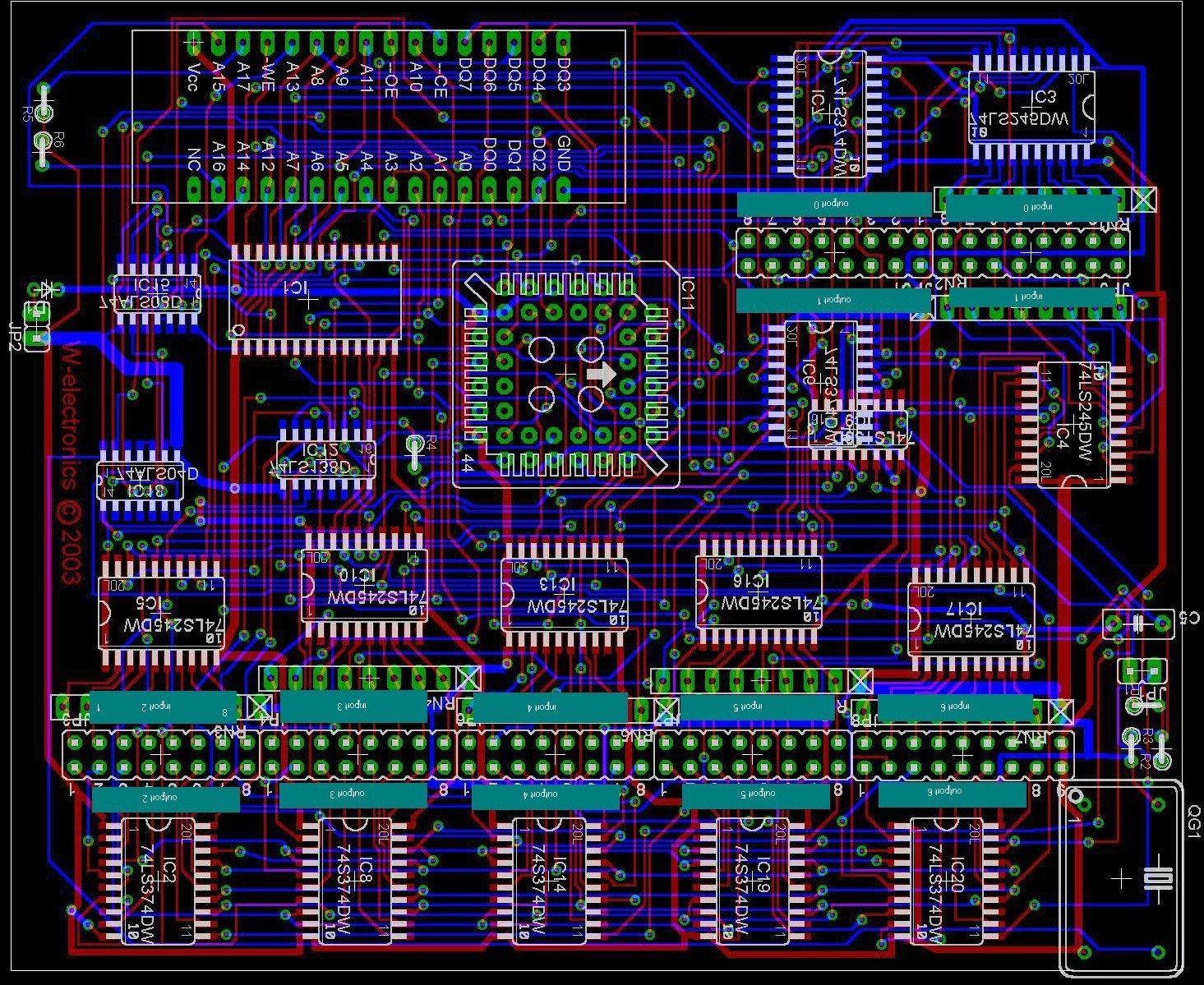
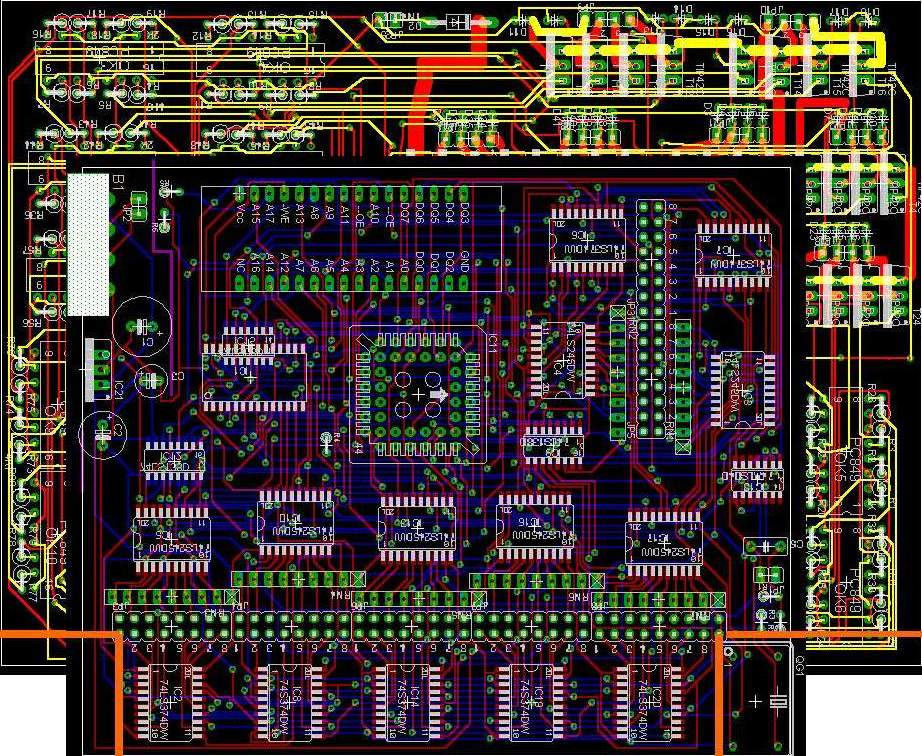
Ein Bild der Logik-Leiterplatte von meinem Editor :

Dann ein Bild der Leiterplatte mit den Endstufen und der Wandlung 5-24 Volt:

(in diesen Bildern hab ich meine Notizen reingemalt.
Ein Schaltplan sieht nicht original so aus,
aber ziemlich ähnlich, ohne meinen Zahlen)
Hier das Bild der beiden Leiterplatten übereinander.
Nur mit dieser Photomontage konnte ich dann die Abmessungen des Gehäuses bestimmen,
worin es am Ende sein soll. Dieses weisse Gehäuse weiter oben.

Die ganze Sache lief also schon mal im Ansatz,
nachdem ich das Teil mit einer Excel-Tabelle mühlselig
programmiert hatte.
Hier und da hab ich nochmals nach Köln fahren müssen,
wegen kleinere Programmänderungen.
War aber dann nichts mehr Dragisches.
Frage stellen !
Am Schluss war alles soweit fertig, und die Anlage hat
tatsächlich produziert.
(ich hab jetzt leider kein Gesamtbild der Anlage oder ein
Video davon, aber weiter unten kommen Teile davon)
Dann hatte ich drei Wochen Urlaub....
In diesen drei Wochen entstand ein weiteres Programm für den PC.
Hintergrund war die stundenlange und komplizierte
Arbeit mit der Excel Tabelle, wenn man nur ein paar Programmänderungen
an der Anlage zu machen hatte.
Also kam die Idee, eine graphische Benutzeroberfläche zu bauen.
Somit war man in der Lage, sehr einfach und schnell eine
Änderung zu machen. Ganz zu schweigen von der besseren Übersichtlichkeit.
Die 3 Wochen Urlaub hab ich voll diesem Programm gewidmet.
Schliesslich hab ich auch das geschafft.
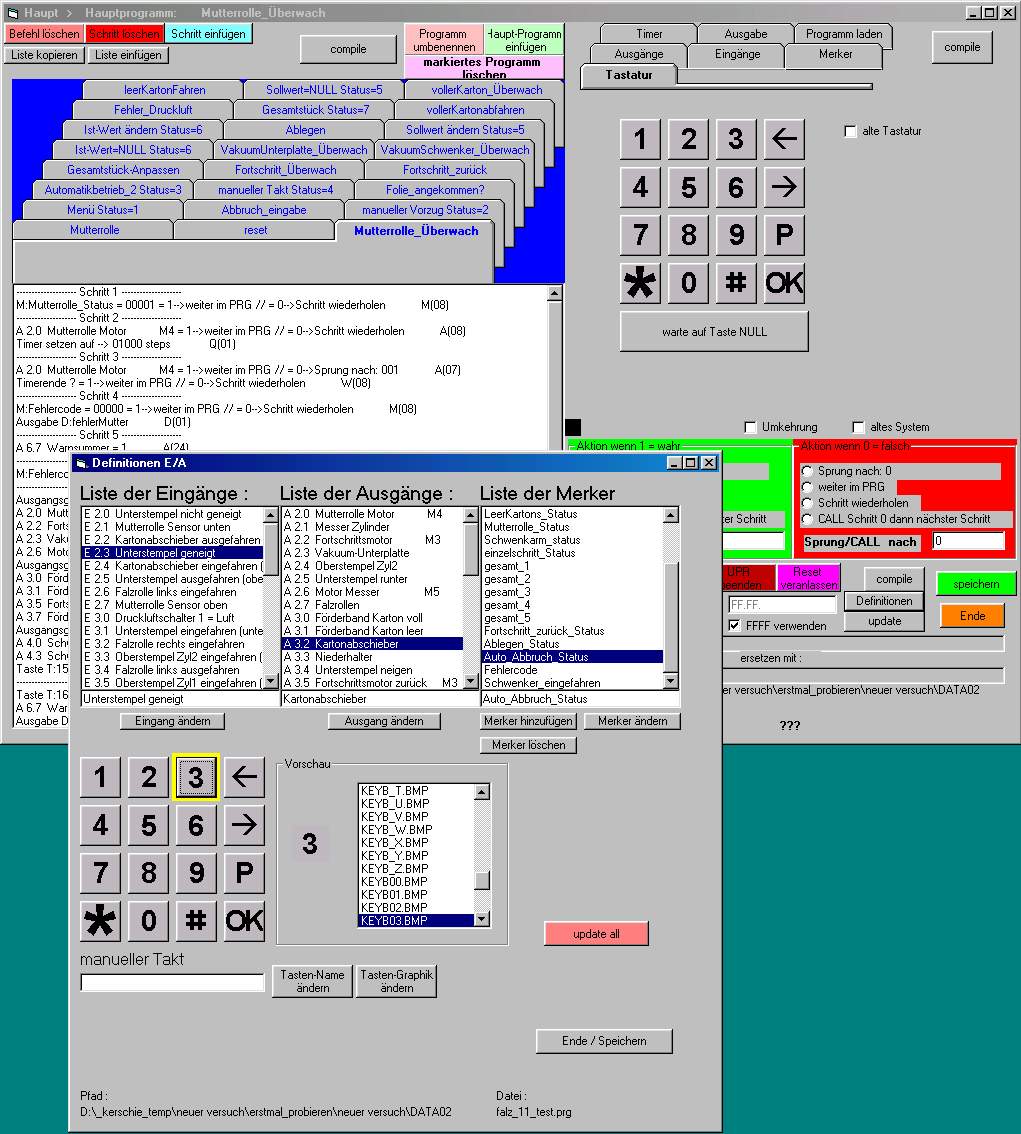
Hier paar Bilder der Benutzeroberfläche :
Hauptbild mit den verschiedenen Unterprogrammen und Eingängen, Timer etc..

Bild der Maske zum Erstellen/ändern einer Display-Ausgabe

Auf dieser Maske kann man alle Ein- und Ausgänge, sowie Merker und Tasten
mit einem leicht zu merkenden Namen definieren oder benennen

Frage stellen !
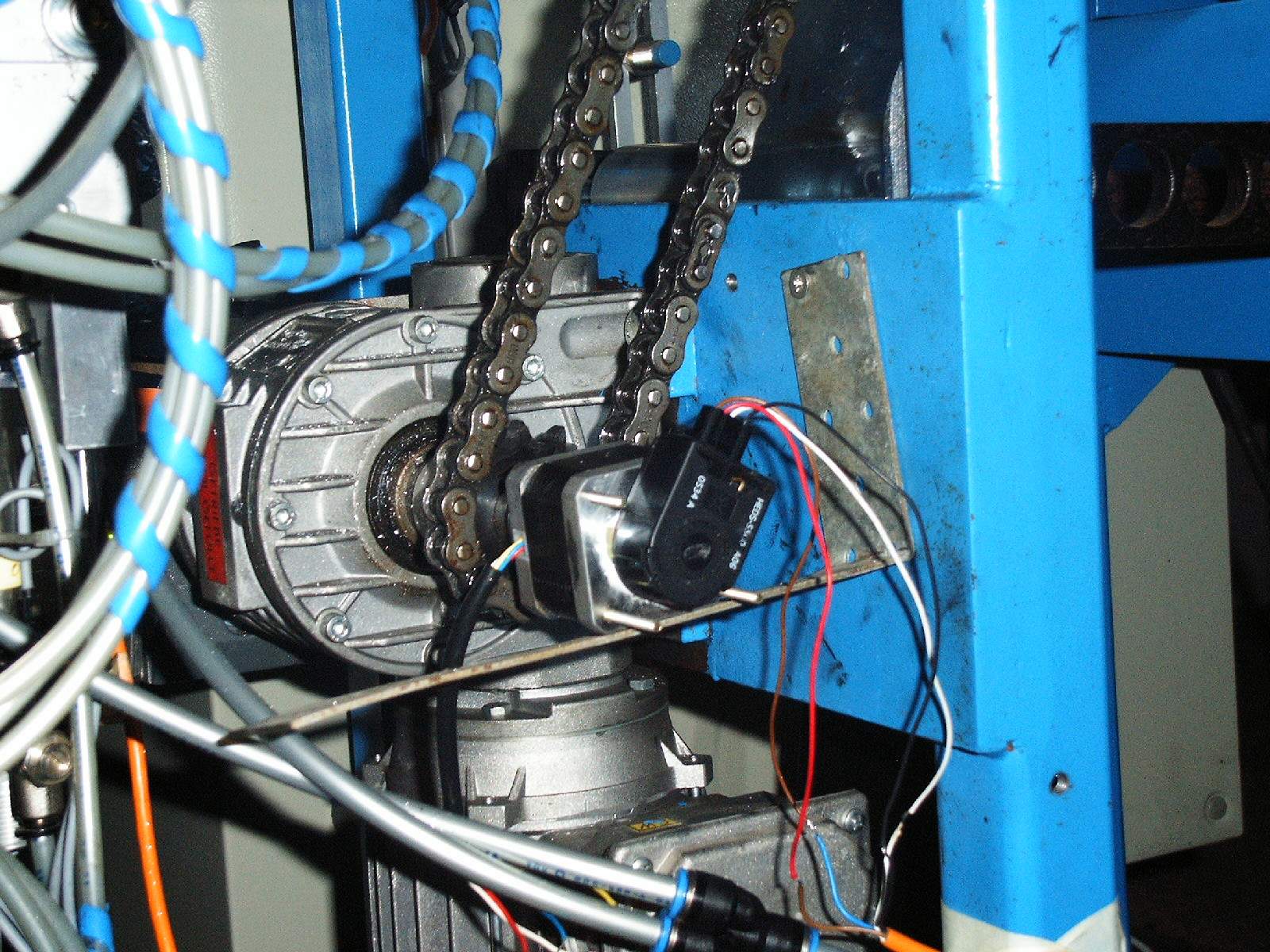
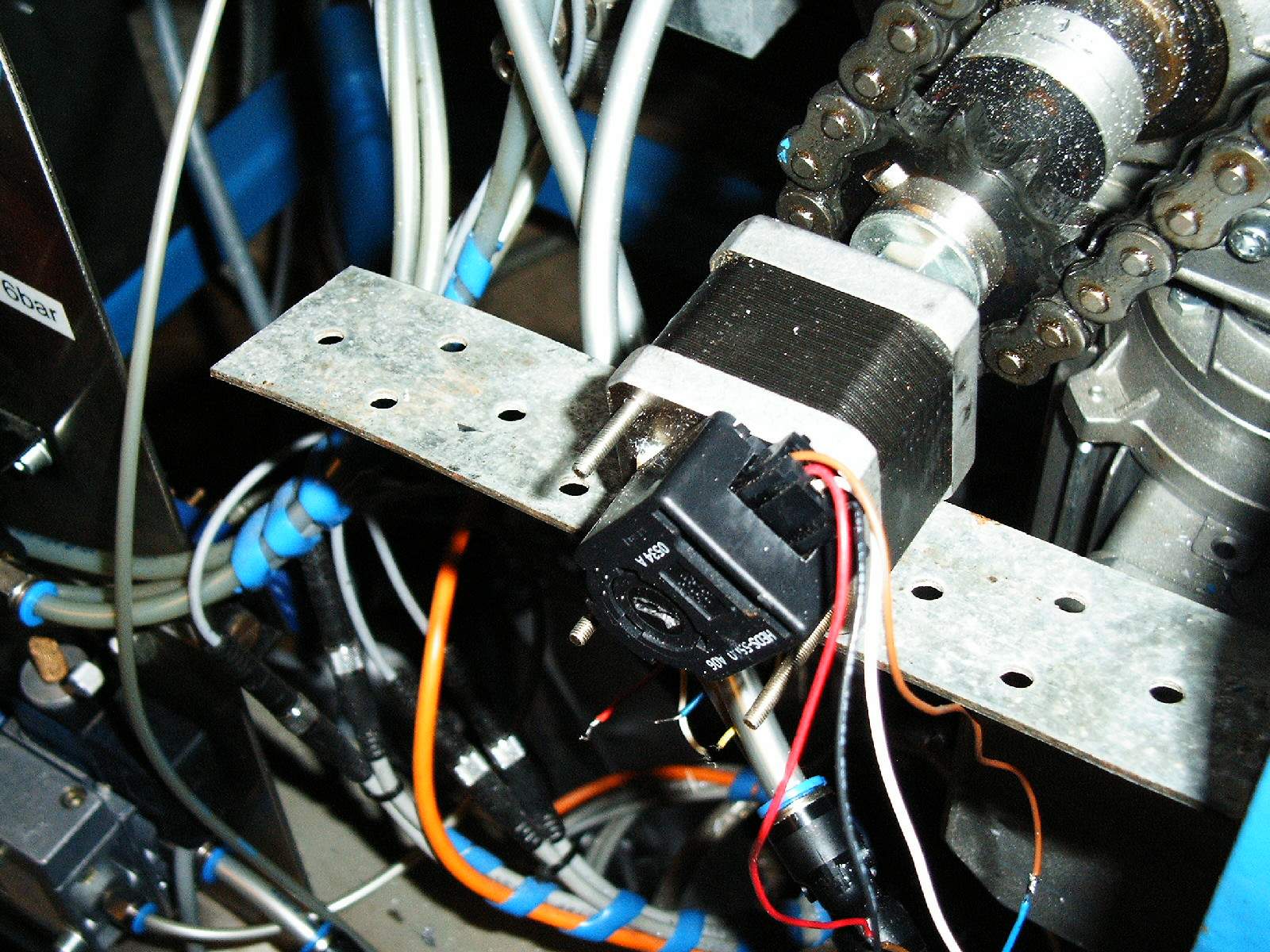
Das hier ist ein Teil des unteren Motors, der die dicke Kette antreibt.
Daran hab ich einen kleinen Motor provisorisch gebaut, der nur dafür da ist,
den Encoder zu tragen. Mit diesem Encoder konnte ich exakt messen,
wie weit der grosse Motor dreht.
Denn das Problem war, dass die Folie, die dieser Motor weiter oben fördert,
immer unterschiedlich lang ist. D.h. der Motor stoppt immer unterschiedlich.
Also hab ich dort diese Wegmessung eingebaut, und der kleinen Leiterplatte
dort oben einprogrammiert, dass wenn der Motor über 5500 Schritte fährt,
dass er dann wieder zurück fahren muss.
Und wenn er unter 5300 ist, dann soll er wieder ein Stück vorfahren,
bis er eben zwischen 5300 und 5500 stehen geblieben ist.
Dieses Hin- und Her hört man an dem Klackern im Video,
und sieht man an den drei Leuchtdioden, eine ist für Vorwärts,
eine ist für Zurück, und die mittlere war glaub ich Position ok.
Bilder von diesem grossen Motor, der dicken Kette und meinem Provisorium als Wegmessung


und die dazugehörige Auswerte-Elektronik. Daneben hab ich dann noch nen Laptop
gehabt, der mir dann alle Wegmessungen aufgezeichnet hat. Sieht man hier nicht


Frage stellen !
Video, man sieht die drei oder vier Leuchtdioden flackern und hört den Motor klackern

Video, hier der Motor mit der Kette, man kann deutlich sehen,
wie er sich immer wieder antastet an die Position

Video, Nahaufnahme

Da auf den Videos kann man auch erkennen, wie langsam das alles überhaupt schon ist.
Es hat aber funktioniert. Die Folienabschnitte waren genauer geschnitten.
AAAAber ...... Das gesamte wurde noch langsamer.
Also musste eine andere Lösung her.
Lösung war dann, eine zusätzliche Steuerung zu bauen, welche einen grossen
Schrittmotor ansteuert, dadurch war man nicht nur absolut exakt in der Wegmessung,
sondern auch doppelt so schnell !
Davon hab ich auf die Schnelle leider nicht so viel Bilder.
Hier mal der erste Versuchsaufbau, wieder auf Lochraster :

Frage stellen !
Wir hatten einen Dauerversuch gemacht, und alles passte soweit,
wir haben Luftsprünge gemacht, als wir den erheblichen Geschwindigkeitszuwachs
live gesehen hatten. Und dann war des auch noch super-exakt.
Also hab ich den Auftrag bekommen, eine fertige Steuerung zu bauen.
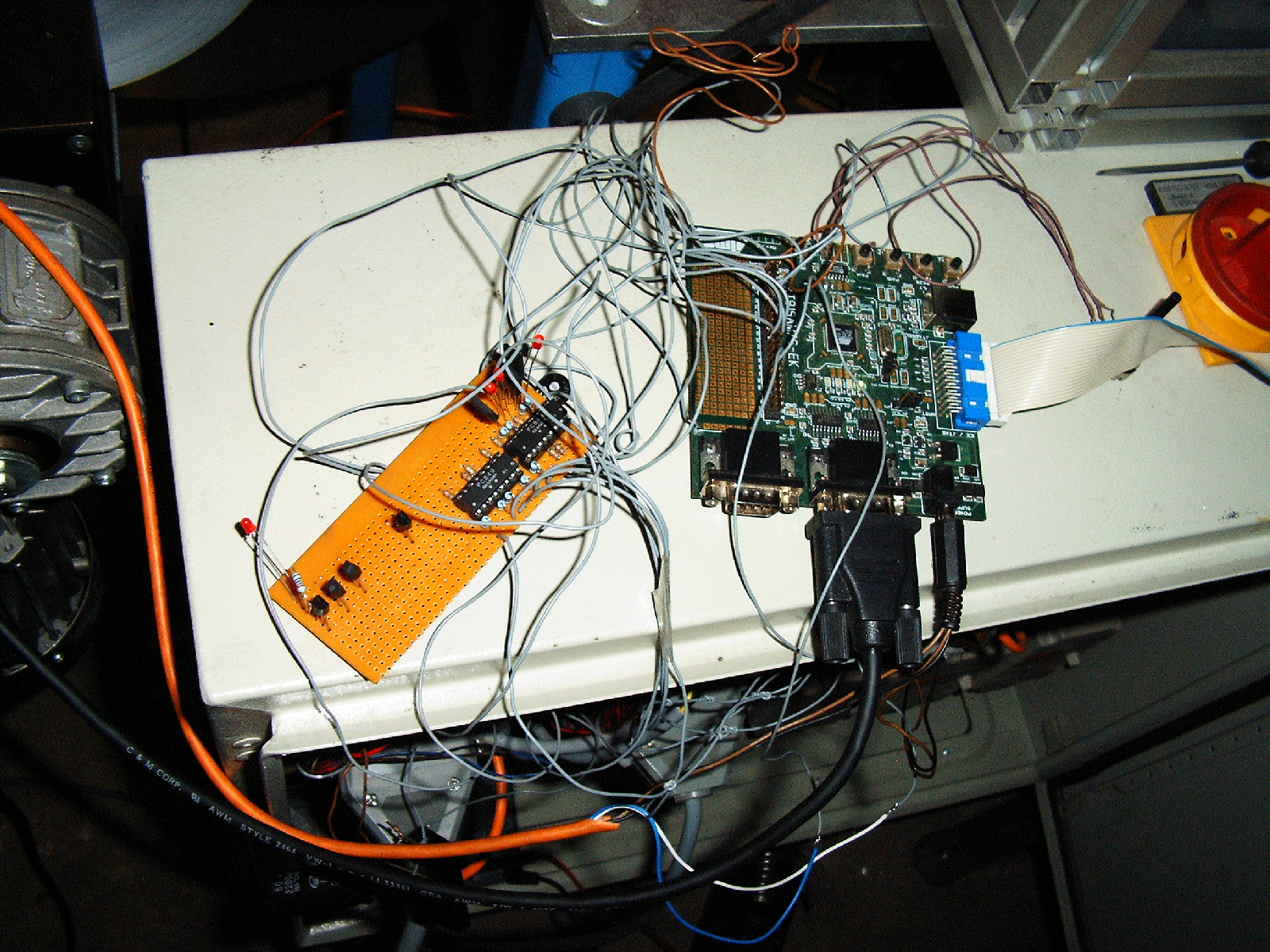
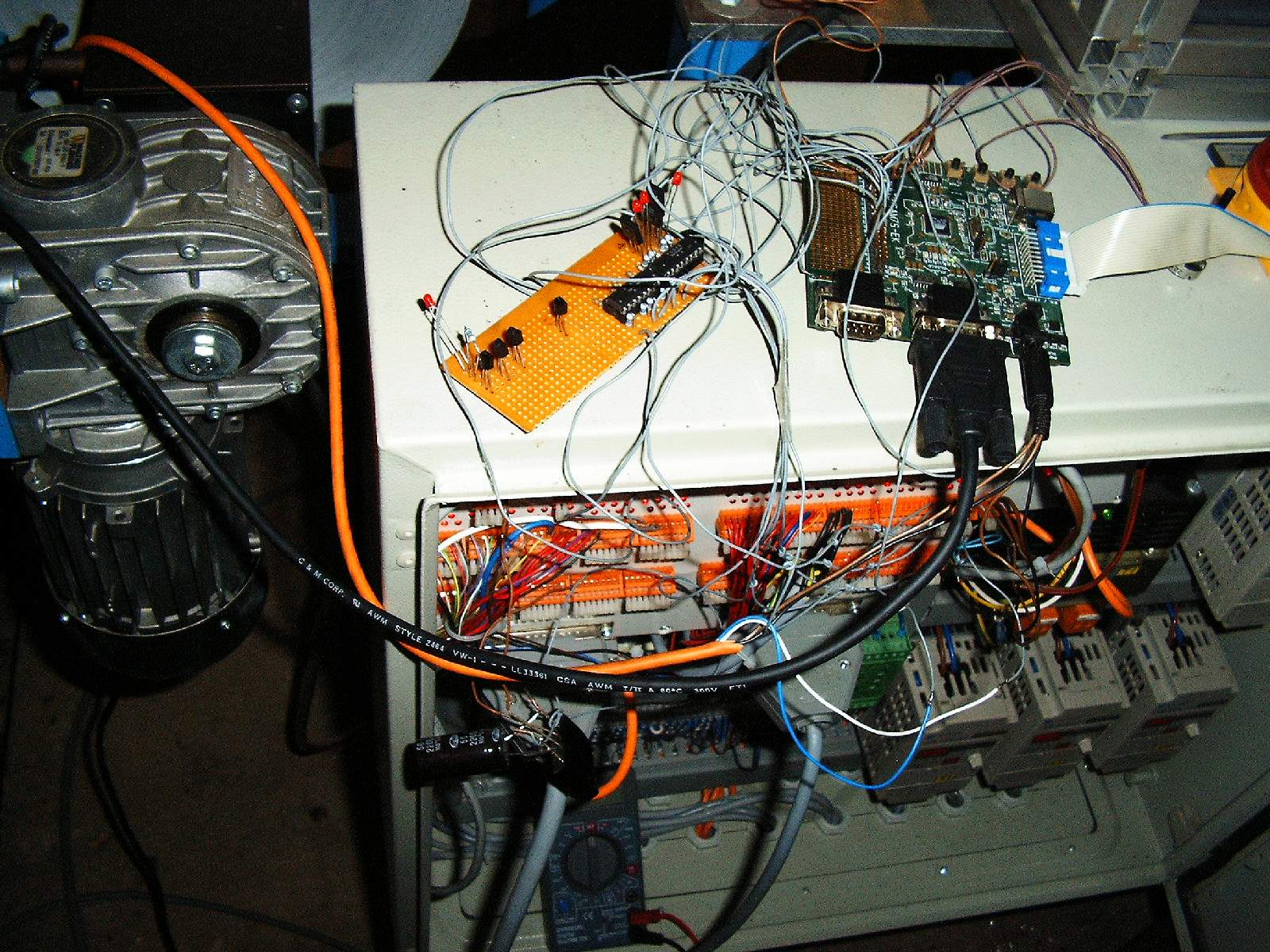
Videos kommen weiter unten, hier mal paar Bilder der Schaltung,
wie gesagt, i hab nur die paar hier gefunden :
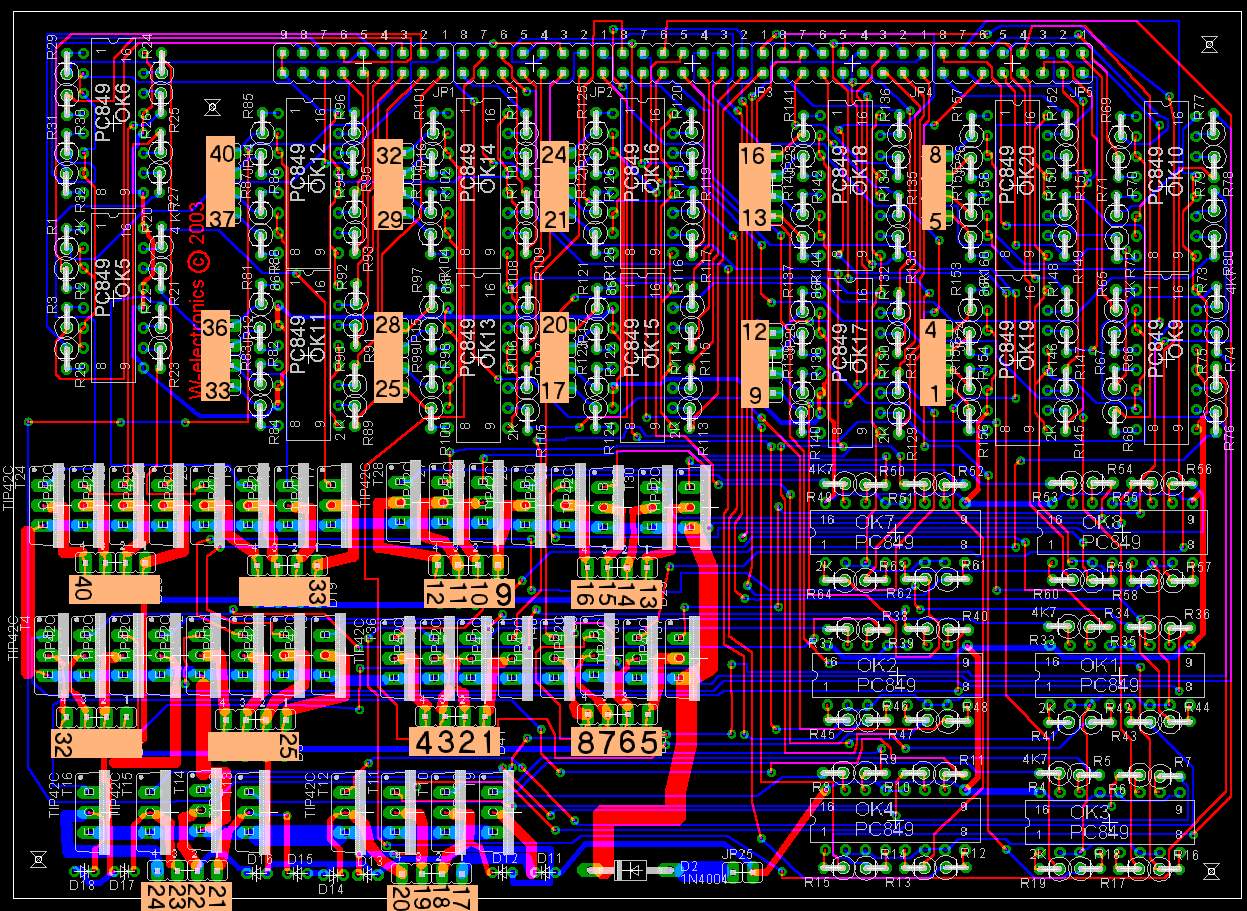
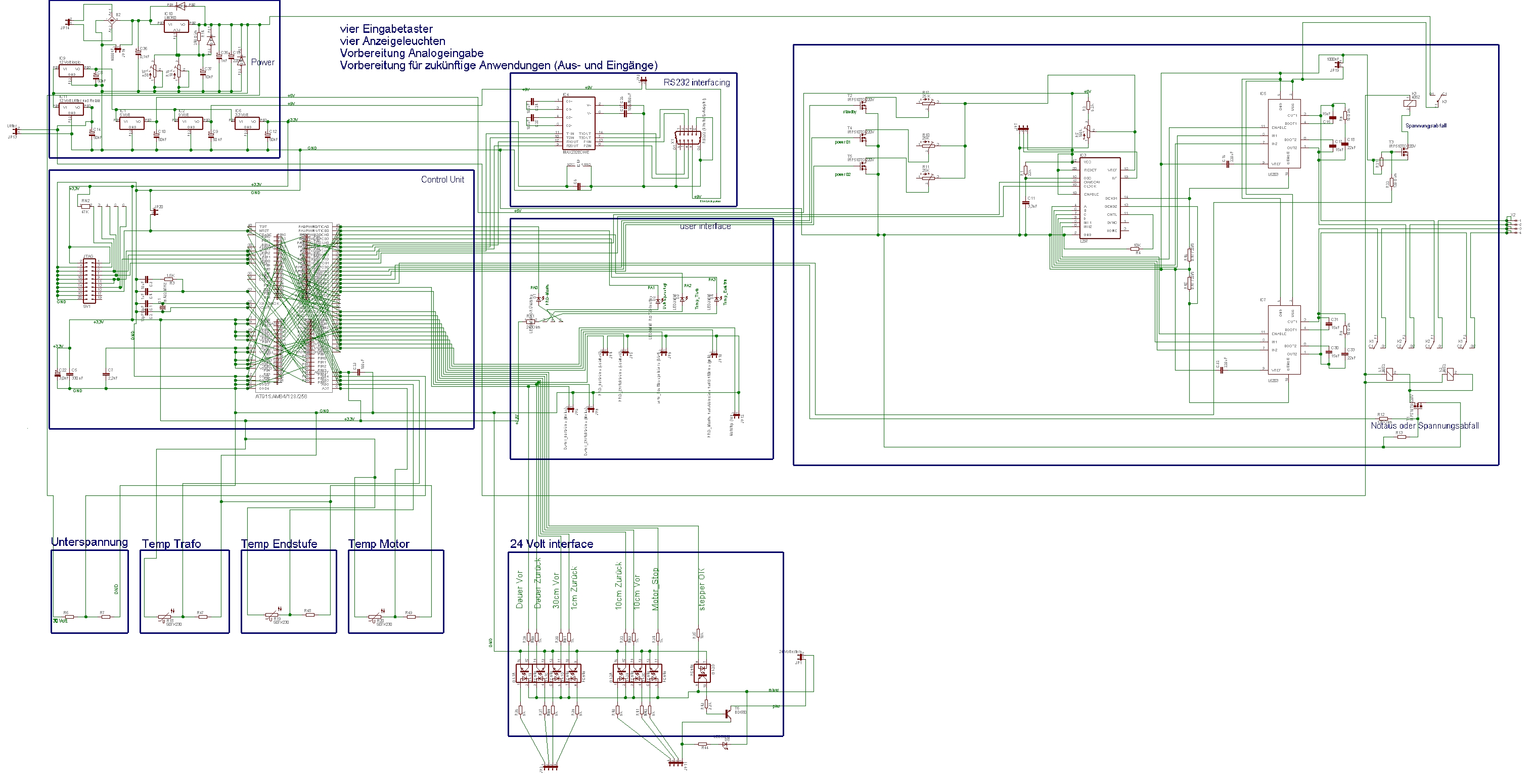
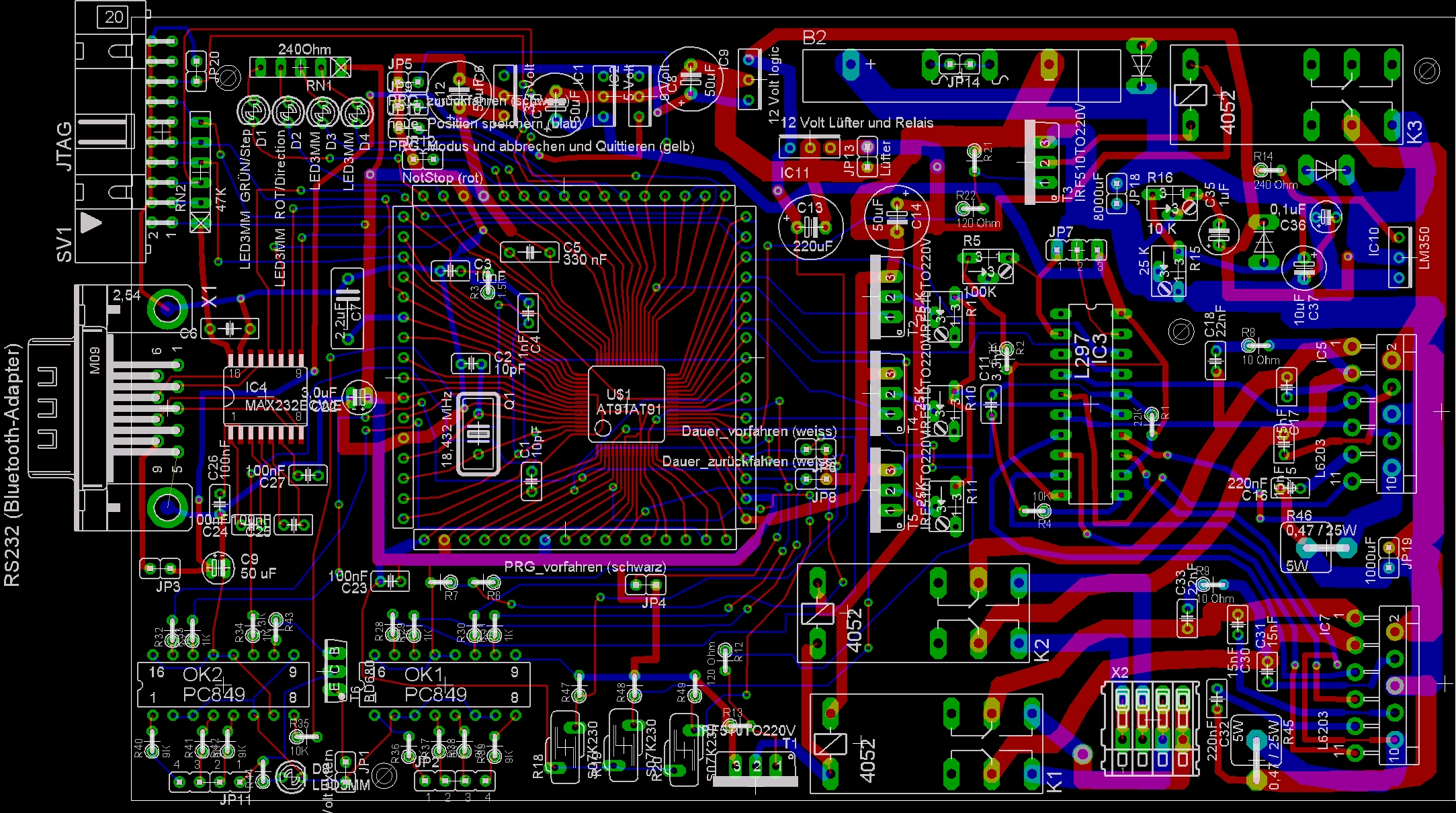
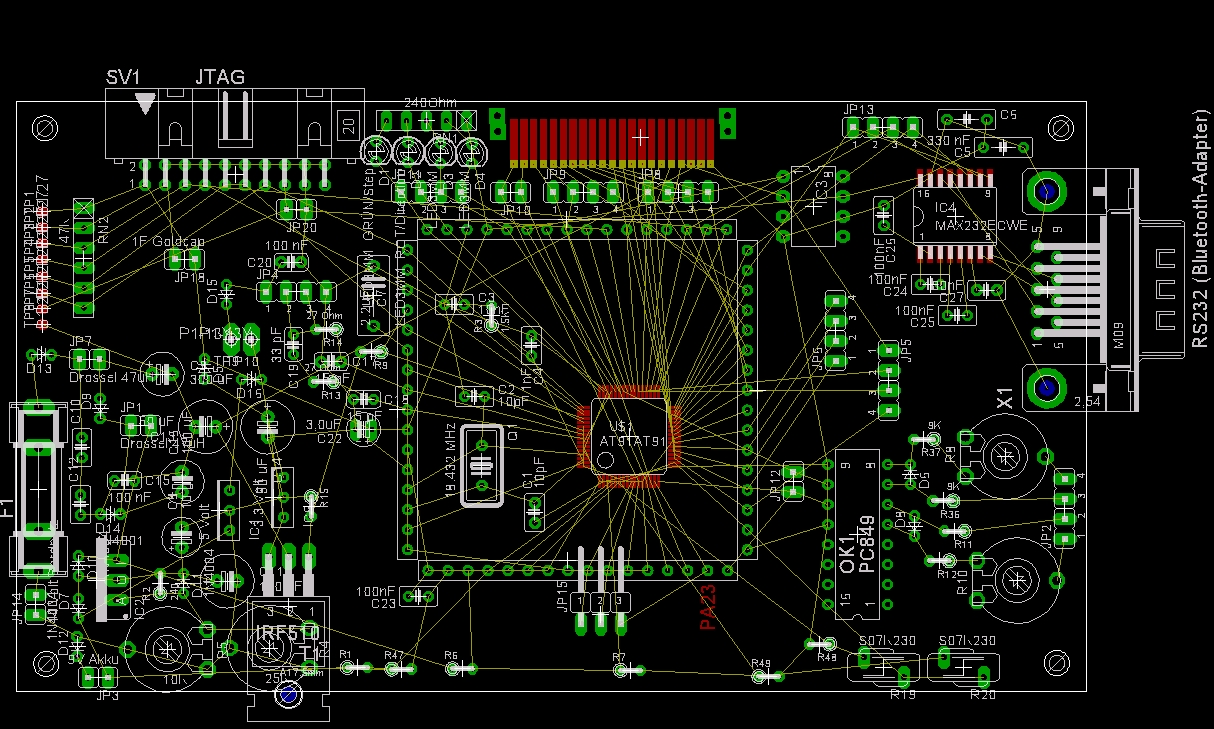
Schaltplan der fertigen Schrittmotor-Steuerung :

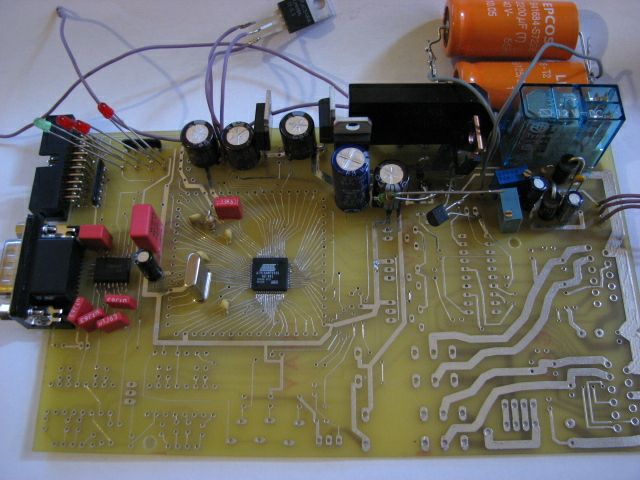
Mechanisches Board (Leiterplatte) der fertigen Schrittmotor-Steuerung :

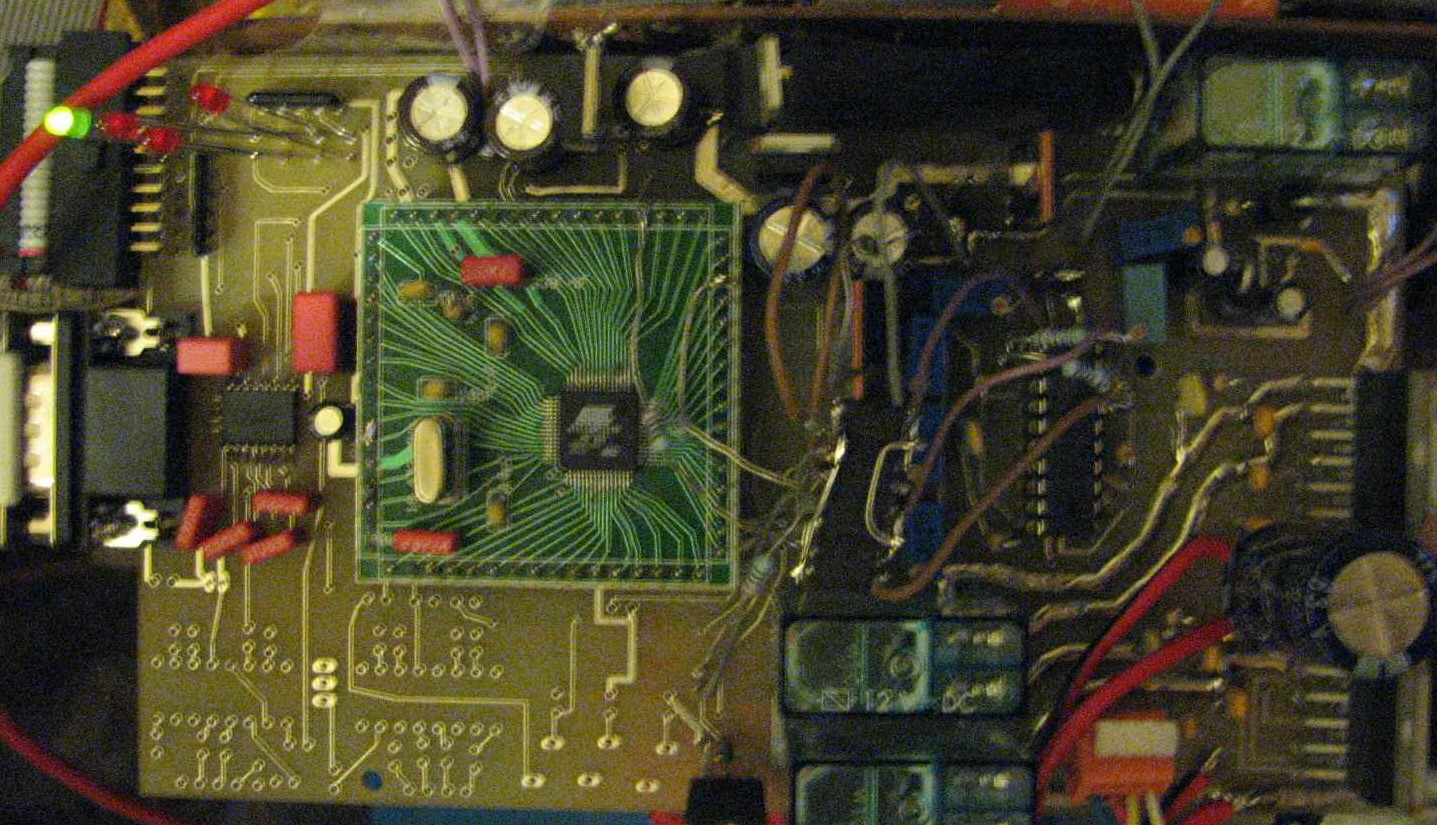
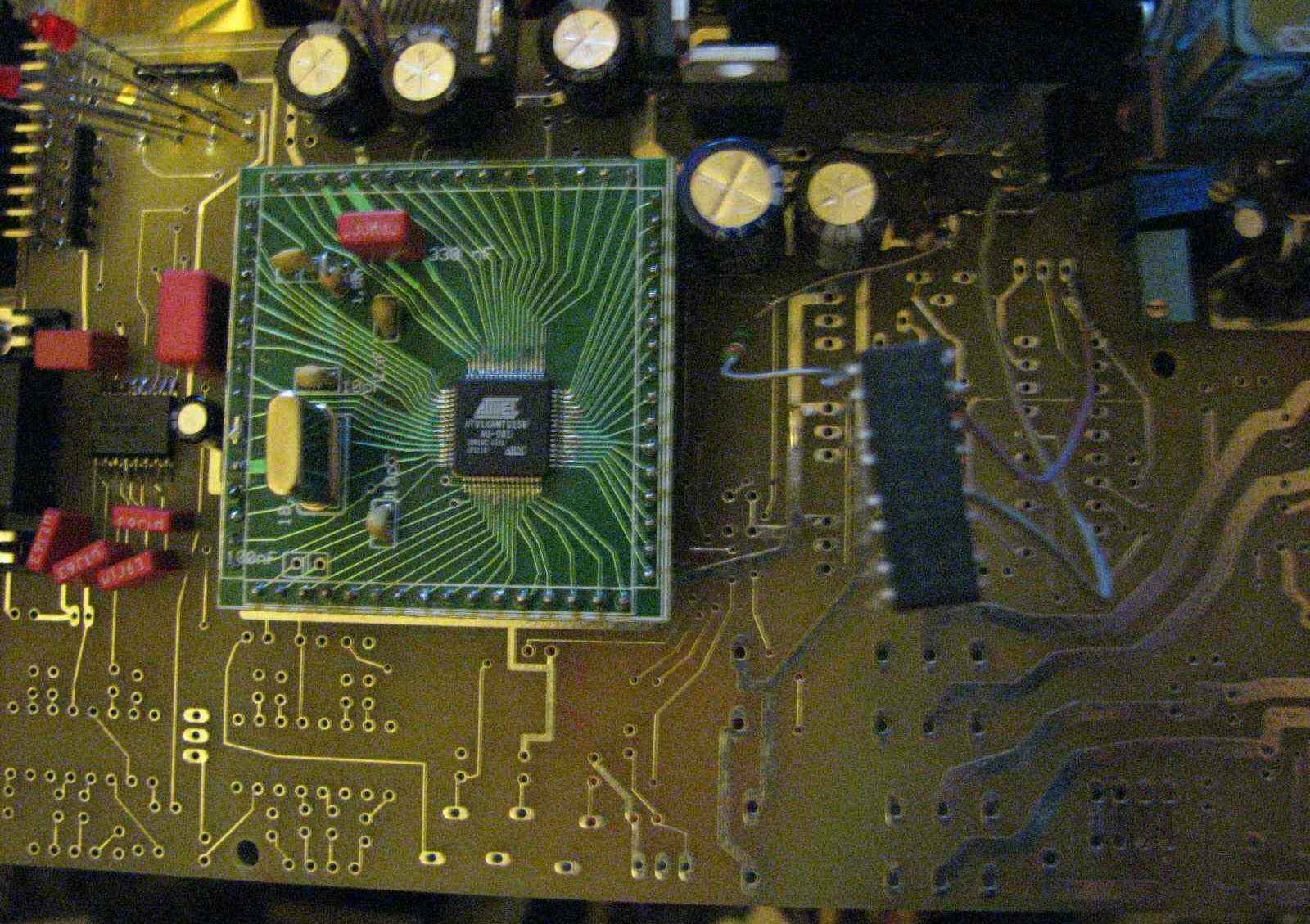
Die Steuerung auf dem Schreibtisch in der Aufbauphase, rechts mit einer grünen Leiterplatte,
weil mir der erste Prozessor durchgebrannt war.


Nahaufnahme:

Frage stellen !
Video, den alten langsamen Motor mit der Kette haben wir ausgetauscht
durch den neuen Schrittmotor mit einem Zahnriemenantrieb.
Im Vergleich zu dem Video mit der Kette, deutlich schneller für einen Zyklus.

Video, Nahaufnahme der Schrittmotors

Video, hier von oben vorne, man kann den deutlich rascheren Folienvorzug erkennen.

Video, hier von oben hinten, hier sieht man das andere Ende des Zahnriementriebes,
bzw. die beiden Rollen, die er antreibt, und dazwischen die Alu-Folie.
Das Teil, dass am Ende eines jeden Zyklus da so quer rüberrutscht,
das ist das Messer, das die Folie abschneidet. Damit hab ich nie rumgespielt.
Nur zum Verständnis.

Frage stellen !
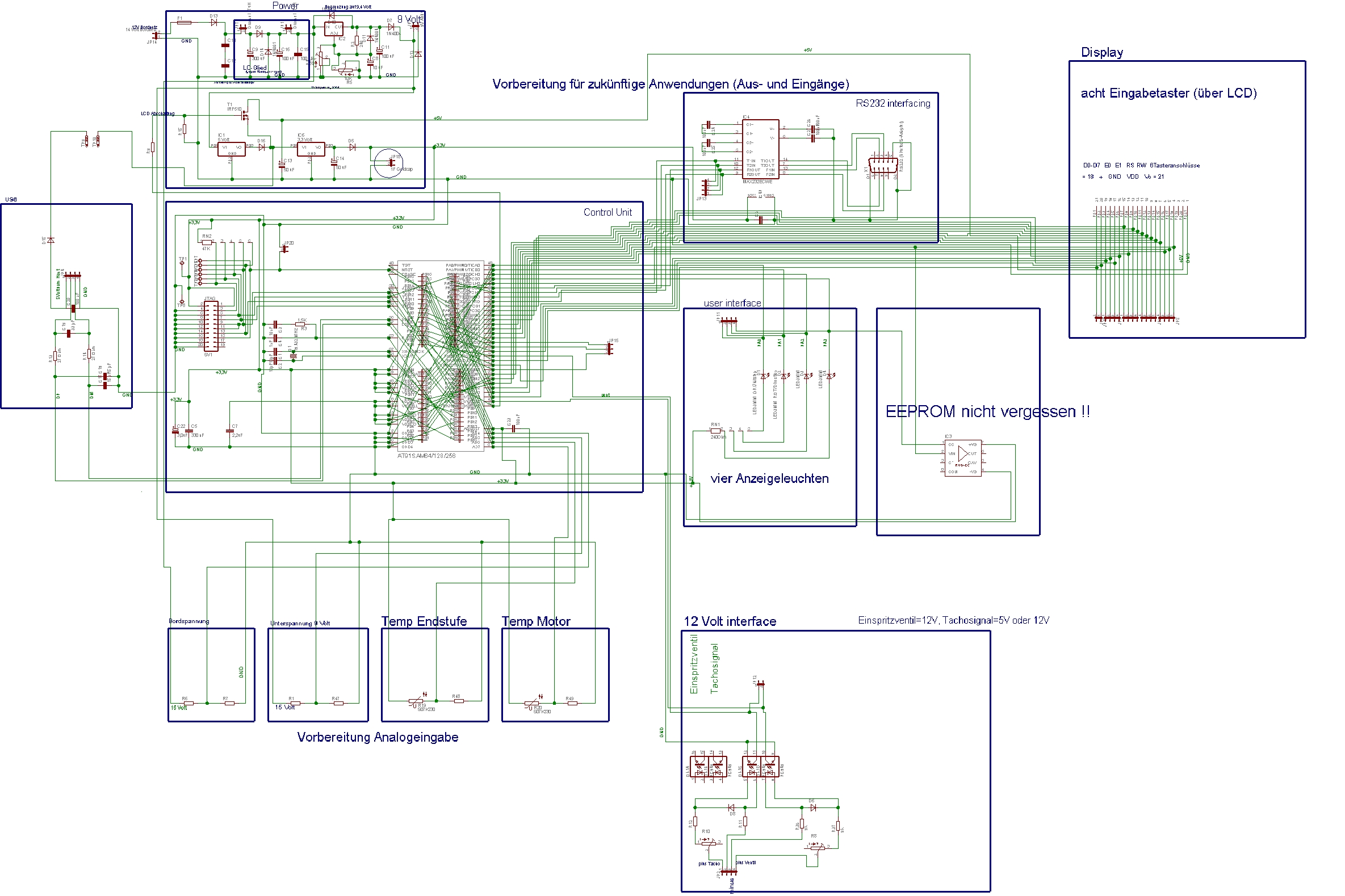
Nächstes Projekt, läuft seit ca. 1,5 Jahren
da sollte ich mal weitermachen, es ist ein Kraftstoffmessgerät .
Der Schaltplan wie er bis jetzt aussieht


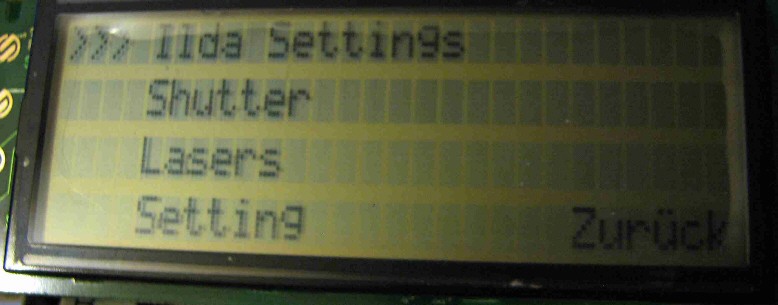
Leider find ich auch die aktuellen Bilder von dem Display grad nicht,
dort wird dann eben die verbrauchte Kraftstoffmenge angezeigt,
die Motordrehzahl absolut exakt, und so ein Balken,
der rauf und runter geht, je nachdem, wieviel Gas man gibt im Auto.
Hier mal eine solche Ausgabe aus einem anderen Projekt :

Frage stellen !
Zum Abschluss noch das Datenblatt des Z80 Prozessors,
mit dem ich diese erste Steuerung aufgebaut hatte (ca. 300 Seiten) :
Datenblatt Z80 Prozessor
Zu Guter letzt das Datenblatt des kleineren aber schnelleren
Prozessors, mit dem ich alle anderen Projekte baue (ca. 700 Seiten) :
Datenblatt Atmel Prozessor